無錫搬運機械手
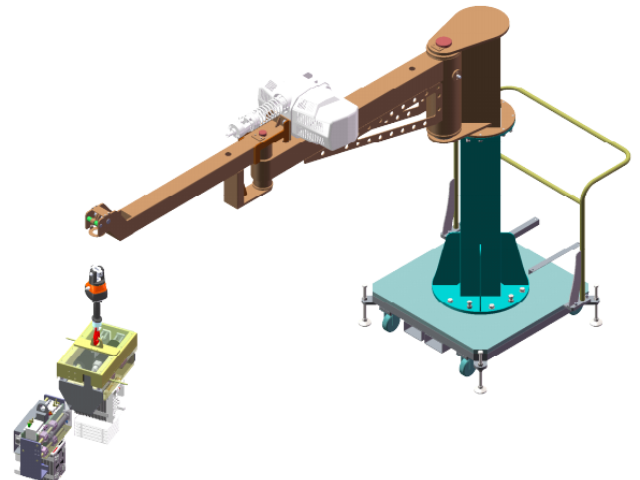
助力機械臂是一種通過氣動或電動驅動實現貨物搬運的設備,其中心結構包括多關節臂體、末端執行器及控制系統。設備通過傳感器識別物料重量與位置,自動調節抓取力度,避免包裝變形。在電商倉庫分揀中心,助力機械臂可抓取紙箱、塑料筐等輕質物料,完成從輸送線到貨架的轉移作業。其操作界面支持預設模式,如單層抓取、多層堆疊等,操作人員通過觸摸屏即可快速切換。設備表面進行防銹處理,適應高濕度倉儲環境,維護時只需定期潤滑關節部件即可保持性能穩定。此外,助力機械臂內置安全傳感器,當檢測到障礙物時自動暫停作業,避免碰撞風險。其模塊化設計允許根據物料尺寸更換末端夾具,提升設備通用性。工業機械手配備高剛性臂體,適應金屬加工的高負荷作業。無錫搬運機械手
碼垛機械手是化工行業處理袋裝物料的專屬設備,通過較強度合金框架與防滑夾爪組合,實現50公斤至1噸物料的穩定搬運。其配備防爆電機與靜電接地裝置,滿足易燃易爆物料的搬運規范。在化肥生產車間,碼垛機械手可抓取編織袋、塑料袋等包裝形式,按照預設圖案進行碼垛作業,單次堆垛高度達2.5米。設備配備壓力傳感器,實時監測夾爪與物料的接觸力,避免包裝破損。其表面進行防腐蝕處理,適應酸堿性環境,清潔時只需用水沖洗即可。此外,碼垛機械手內置安全光幕,當檢測到人員進入作業區域時自動暫停,防止碰撞風險。設備操作界面支持多語言切換,適應跨國企業的管理需求。無錫搬運機械手四軸機械手在玩具組裝中,完成多部件的自動鎖付作業。
伺服機械手是精密加工領域實現高動態響應的關鍵設備,通過伺服電機與高精度減速機的組合,實現微米級定位精度。其主體結構采用碳纖維材質,重量輕且剛性高,適合高速作業場景。在光學元件生產線,伺服機械手可抓取直徑為200毫米的玻璃鏡片進行鍍膜作業,通過力控傳感器確保接觸力度小于2N。設備配備的視覺定位系統能實時補償工件位置偏差,確保裝配精度。其控制軟件內置運動學算法,可優化軌跡規劃,減少振動與沖擊。此外,伺服機械手支持EtherCAT總線通信,與加工中心形成閉環控制系統,實現生產數據的實時同步。設備表面進行防靜電處理,適應無塵車間環境,維護時只需定期校準傳感器即可。
六軸機械手是航空制造領域實現復雜裝配的中心設備,通過六自由度關節結構與末端工具的組合,完成飛機零部件的鉆孔、鉚接與檢測。其主體結構采用鈦合金材質,重量輕且剛性高,適合大型工件加工場景。在機翼裝配車間,六軸機械手可抓取重量達1噸的復合材料板件進行定位作業,通過激光跟蹤儀確保裝配精度。設備配備的力控傳感器能感知加工壓力,自動調整進給速度,避免材料變形。其控制軟件內置工藝行家系統,涵蓋不同材質、結構的參數組合,操作人員可通過觸摸屏快速調用。此外,六軸機械手支持多機協同作業,通過總線通信實現加工節拍的精確同步。設備表面進行耐高溫涂層處理,適應焊渣飛濺環境,故障率低于0.1%。伺服機械手在光學加工中,完成鏡片的高精度研磨作業。
上下料機械手是一種專為數控機床設計的自動化設備,通過桁架結構實現工件的自動搬運。在軸類零件加工車間,上下料機械手可抓取重量達30公斤的毛坯件,進行車削、銑削等多工序加工。設備采用雙夾爪設計,同時抓取待加工件與已加工件,縮短換料時間。其配備的碰撞檢測功能在接觸機床防護門時自動暫停,避免設備損壞。上下料機械手表面進行防銹處理,適應切削液飛濺環境,維護時只需定期更換密封圈即可。此外,設備支持與MES系統對接,通過以太網實時上傳生產數據,實現車間數字化管理。其模塊化設計允許根據機床型號調整臂展與夾爪類型,提升設備通用性。氣動機械手在電子制造中,采用防靜電設計保護元件。南京自動化機械手品牌
六軸機械手在康復器械中,輔助患者完成肢體訓練動作。無錫搬運機械手
伺服機械手是一種采用伺服電機驅動的自動化設備,通過閉環控制實現高精度動作。在光學元件加工車間,伺服機械手可抓取直徑5毫米的鏡片,進行鍍膜與檢測作業。設備采用低摩擦導軌與高剛性臂架,確保運動過程中的微小振動抑制。其配備的力傳感器實時監測抓取力度,避免脆性物料破損。伺服機械手表面進行防靜電處理,避免元件吸附灰塵,維護時只需定期校準傳感器即可保持性能。此外,設備支持與加工機床聯動,通過I/O信號自動交換動作指令,實現無人化生產。其動態響應時間低于10毫秒,卓著提升生產節拍。無錫搬運機械手
- 深圳上下提升機規范 2025-09-22
- 廣東氣動機械手原理 2025-09-22
- 鋼板吸吊機品牌 2025-09-22
- 湖南z型提升機參數 2025-09-21
- 上海氣動助力機械手價格 2025-09-21
- 武漢無動力吸吊機公司 2025-09-21
- 常州液壓提升機批發 2025-09-21
- 河南自動提升機多少錢一臺 2025-09-21
- 廣州氣動機械手多少錢 2025-09-21
- 上海氣管式吸吊機 2025-09-21
- 南寧SMC流水線阻擋氣缸生產廠家 2025-09-22
- 江蘇步進電機驅動器零售價 2025-09-22
- 湖南銷售電阻測試報價 2025-09-22
- 江蘇閘閥齒輪箱方案設計 2025-09-22
- 廣東耐高溫粉末冶金單向軸承定制 2025-09-22
- 上海輪轂軸承噴油閥廠家電話 2025-09-22
- 黑龍江電子擦拭布無紡布設備 2025-09-22
- 廣州超聲波數控機床報價 2025-09-22
- 韶關智能包裝機供應 2025-09-22
- 成都診斷試驗室**管生產設備 2025-09-22