南京激光切割機機械手原理
吸盤機械手是包裝生產線的重要設備,通過真空吸盤與氣動驅動組合,實現紙箱、塑料盒等輕質物料的無損搬運。設備采用模塊化設計,吸盤數量與布局可根據物料尺寸調整,適應多樣化包裝形式。在食品飲料工廠,吸盤機械手可抓取瓶裝、罐裝產品進行裝箱作業,通過壓力傳感器實時監測吸附狀態,避免包裝變形。其配備的防塵罩能有效隔離粉塵,延長設備使用壽命。此外,吸盤機械手支持與輸送線聯動,通過總線通信實現貨物到位檢測與抓取動作的同步,減少等待時間。設備表面進行耐磨處理,適應長期高速運轉,故障率低于0.5%。氣動機械手在紡織行業,實現布卷的自動搬運與翻轉。南京激光切割機機械手原理
全自動沖床機械手是沖壓生產線的重要設備,通過氣動或電動驅動與夾具組合,實現金屬板材的自動上下料與碼垛。設備采用較強度合金材質臂體,單次起吊重量可達50公斤,適應高速沖壓作業。在家電制造車間,全自動沖床機械手可抓取鈑金件進行沖孔、拉伸等工序,通過安全光柵確保操作人員與危險區域隔離。其配備的負載傳感器能實時監測物料重量,避免超載風險。設備底部裝有防傾覆支架,即使地面存在油污仍能保持穩定。此外,全自動沖床機械手表面進行防銹處理,適應切削液飛濺環境,維護時只需定期更換密封圈即可。其密封性能達到IP65防護等級,適應高濕度環境,設備壽命長達5年以上。上海焊接機械手設計上下料機械手配備視覺定位系統,自動識別工件位置。
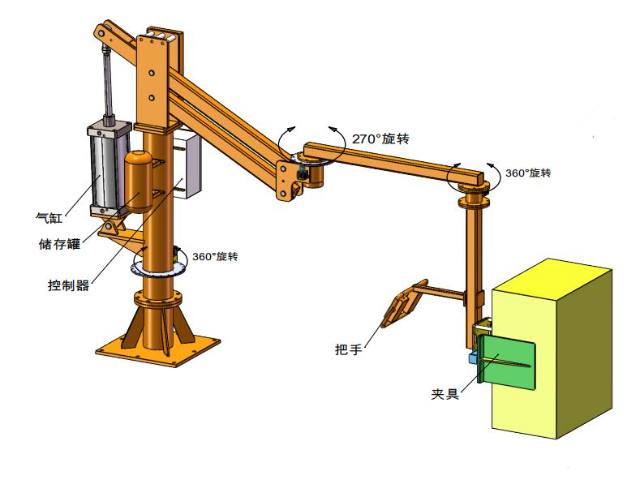
氣動機械手是輕工行業實現低成本自動化的重要設備,通過壓縮空氣驅動氣缸與夾爪,完成物料的抓取與放置。其結構簡單,維護成本低,適用于電子元件、玩具等輕載場景。在文具制造車間,氣動機械手可抓取尺寸為50毫米×30毫米的塑料配件進行組裝作業,單次循環時間低于0.8秒。設備配備的平行夾爪通過氣壓調節控制開合力度,避免壓壞脆弱的塑料件。其控制邏輯采用PLC編程,操作人員可通過觸摸屏調整動作時序。此外,氣動機械手支持快速換型,通過更換夾爪模具即可適配不同產品。設備表面進行防銹處理,適應油性環境,故障率低于0.3%。其能耗比電動機械手降低60%,符合節能減排要求。
助力機械臂是一種通過氣動或電動驅動實現物料搬運與裝配定位的設備,其設計重點在于人機協同作業的便捷性。在汽車總裝車間,助力機械臂常用于發動機艙部件、座椅等重型物料的安裝。設備通過負載平衡系統自動補償物料重量,操作人員只需施加輕微力量即可完成精確定位。其可調節臂展覆蓋2米至6米的工作范圍,適應不同車型的生產線布局。助力機械臂表面進行防銹處理,適應涂裝車間的化學環境,維護時只需定期潤滑關節部件。此外,設備配備安全鎖止功能,當檢測到異常外力時自動暫停作業,保障人員安全。其模塊化接口支持快速更換夾具,滿足多車型共線生產需求。桁架機械手在汽車焊裝線中,實現車身骨架的自動搬運。
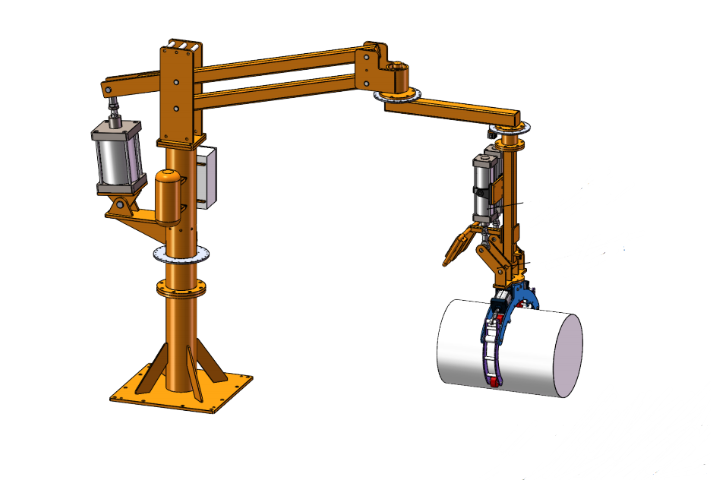
氣動助力機械手是一種利用氣壓平衡原理實現重載物料搬運的設備,通過氣缸與機械臂的組合,抵消物料重力,降低操作人員勞動強度。設備采用較強度鋁合金材質,單臂負載可達300公斤,適應發動機、變速箱等重型零部件的搬運。在汽車總裝車間,氣動助力機械手可抓取動力總成進行裝配作業,通過浮動裝置自動調整物料姿態,適應車身安裝孔位。其配備的安全鎖止功能在氣壓異常時自動固定物料,避免墜落風險。設備表面進行防銹處理,適應潤滑油飛濺環境,清潔時只需用濕布擦拭即可。此外,氣動助力機械手支持多工位協同作業,通過總線通信實現生產節拍的同步。其模塊化設計允許根據物料尺寸更換末端夾具,提升設備通用性。吸盤式機械手采用柔性材質,防止玻璃表面產生劃痕。南京激光切割機機械手原理
助力機械臂廠家優化驅動系統,提升設備運行平穩性。南京激光切割機機械手原理
工業機器人機械手是現代自動化生產線的中心組件,通過多關節臂體與末端執行器的協同,實現物料搬運、裝配、檢測等復雜任務。設備采用模塊化設計,可根據生產工藝需求更換夾具或工具,如焊槍、噴涂頭等。在汽車總裝車間,工業機器人機械手可抓取車門、發動機罩等大型部件進行精確裝配,通過視覺定位系統確保孔位對齊精度。其配備的力反饋裝置能實時監測接觸力,避免壓裝過度導致零件變形。設備表面進行防塵處理,適應焊接煙塵較多的環境,清潔時只需用壓縮空氣吹掃即可。此外,工業機器人機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其能耗比傳統專屬設備降低20%,卓著降低運行成本。南京激光切割機機械手原理
- 湖南z型提升機參數 2025-09-21
- 上海氣動助力機械手價格 2025-09-21
- 武漢無動力吸吊機公司 2025-09-21
- 常州液壓提升機批發 2025-09-21
- 河南自動提升機多少錢一臺 2025-09-21
- 廣州氣動機械手多少錢 2025-09-21
- 上海氣管式吸吊機 2025-09-21
- 浙江氣動助力機械手廠家 2025-09-21
- 北京氣動助力機械手品牌 2025-09-21
- 上海托盤提升機 2025-09-21
- 徐匯區pvc板材生產廠家 2025-09-22
- 普陀區整套工業機器人制造 2025-09-22
- 陜西氮氧化物氣體分析儀供應商 2025-09-22
- 精密空氣一體機維修 2025-09-22
- 姑蘇區新款隔振器哪家強 2025-09-22
- 山西PVC焊接聯系方式 2025-09-22
- 云南本地熒光溶解氧監測儀 2025-09-22
- 陜西余料清掃清車機價格 2025-09-22
- 長沙工業水處理設備廠家 2025-09-22
- 安徽西林瓶粉劑灌裝機品牌 2025-09-22