發(fā)展開源圖形化編程
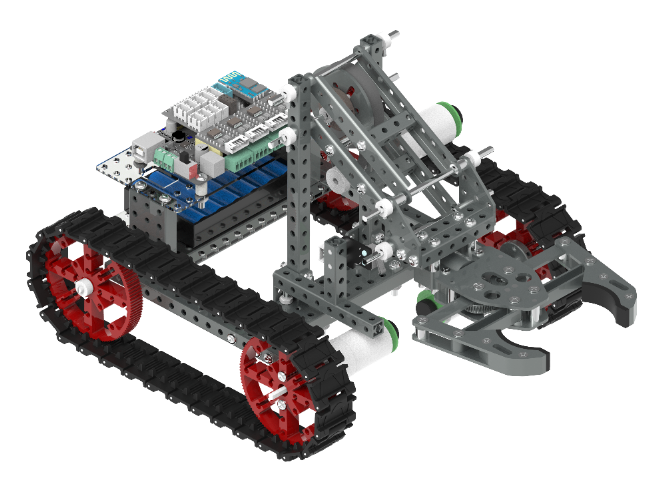
格物斯坦GBOT系列初級甲蟲機器人采用基礎(chǔ)履帶式移動平臺,結(jié)構(gòu)緊湊易組裝。通過ATmega328P主板控制電機驅(qū)動,學(xué)習(xí)基礎(chǔ)運動邏輯。該機器人支持Scratch圖形化編程快速入門,或Arduino代碼深入開發(fā),適合機器人結(jié)構(gòu)認(rèn)知與動作控制教學(xué)。而中級的投石車的設(shè)計模擬了古代利用杠桿原理拋射石彈的大型人力遠射兵器。采用電機配合減速齒輪組驅(qū)動投臂,精確控制拋射力度與角度。使用TT馬達電機實現(xiàn)穩(wěn)定動力輸出,根據(jù)編程內(nèi)容的編寫調(diào)節(jié)投射軌跡。格物斯坦 匯聚較好開源項目,加速技術(shù)傳播??。發(fā)展開源圖形化編程
格物斯坦通過線上社區(qū)(OMO平臺) 與賽事活動構(gòu)建創(chuàng)新網(wǎng)絡(luò):學(xué)生可共享3D模型、代碼庫(如“全自動象棋機器人”開源方案),復(fù)用成熟模塊聚焦功能優(yōu)化,避免“重復(fù)造輪”;企業(yè)如優(yōu)必選、宇樹科技基于其硬件架構(gòu)二次開發(fā),將傳統(tǒng)需500萬元投入的機械臂原型壓縮至單人5天完成,推動創(chuàng)客成果向產(chǎn)業(yè)轉(zhuǎn)化;全球開發(fā)者通過OpenLoong社區(qū)協(xié)作優(yōu)化ROS驅(qū)動包,形成“個體創(chuàng)造-群體迭代”的飛輪效應(yīng)。格物斯坦開源系列的本質(zhì),是以工業(yè)級的精度(0.01mm結(jié)構(gòu)件)支撐教育級的容錯,以分層的工具鏈(點讀筆→ROS)匹配認(rèn)知躍遷(具象→抽象→創(chuàng)造),通過開源生態(tài)將碎片化創(chuàng)意整合為系統(tǒng)性解決方案。這種結(jié)合不僅讓小學(xué)生能在48小時內(nèi)完成聲控家居機器人原型,更讓創(chuàng)客教育從“興趣工坊”升維為“未來工程師的孵化器”——在這里,每個孩子既是問題的發(fā)現(xiàn)者,也是變革的創(chuàng)造者。開源系列開源課程鼓勵解決真實問題,如山區(qū)學(xué)生開發(fā)土壤濕度觸發(fā)的灌溉機器人。
格物斯坦傳感器的優(yōu)勢在于工業(yè)精度與教育易用性的統(tǒng)一:微米級硬件適配:傳感器接口與鋁合金結(jié)構(gòu)件采用0.01mm公差設(shè)計,確保超聲探頭、紅外發(fā)射器等模塊的安裝穩(wěn)定性,抗沖擊性較塑料件提升300%,支持千次拆裝無損耗;全棧式信號處理:內(nèi)置放大濾波電路(如應(yīng)變式稱重傳感器的惠斯通電橋),直接輸出校準(zhǔn)后數(shù)字信號,學(xué)生無需額外搭建電路即可通過I2C/UART讀取數(shù)據(jù),降低電子工程門檻;跨平臺編程融合:在圖形化軟件GScratch中,傳感器數(shù)據(jù)被封裝為“環(huán)境光強度”“障礙物距離”等積木塊,支持拖拽式邏輯設(shè)計;高階開發(fā)者則可調(diào)用ROS驅(qū)動包(如OpenCV視覺庫),實現(xiàn)Python/C++原生控制。
開源課程的優(yōu)勢在于 “產(chǎn)學(xué)研賽一體化”生態(tài):工具鏈貫通:從圖形化編程(GScratch)到工業(yè)級開發(fā)(ROS/Arduino),學(xué)生可在“格物”仿真平臺預(yù)演算法(如抗強風(fēng)機械臂運動策略),再部署至實體硬件驗證,壓縮研發(fā)周期;場景化創(chuàng)新:課程嵌入真實社會議題,如山區(qū)學(xué)生開發(fā)“智能澆花系統(tǒng)”,通過土壤濕度傳感器觸發(fā)機械臂灌溉指令,或參與IRM國際機器人創(chuàng)客大賽,設(shè)計火源定位誤差小于2米的林火監(jiān)測無人機;開源社區(qū)協(xié)作:OpenLoong平臺共享3D模型與代碼庫(如“全自動象棋機器人”方案),學(xué)生可復(fù)用成熟模塊聚焦功能優(yōu)化,而企業(yè)如優(yōu)必選、宇樹科技亦基于其硬件架構(gòu)二次開發(fā),將傳統(tǒng)需500萬元投入的機械臂原型壓縮至單人5天完成。開放工廠參觀,學(xué)生實地體驗智能制造流程。
格物斯坦開源產(chǎn)品在教育方面的應(yīng)用主要在基礎(chǔ)教育階段(K12)機械結(jié)構(gòu)與工程思維:小學(xué)生通過搭建“齒輪傳動摩天輪”,理解杠桿原理與能量轉(zhuǎn)化效率;中學(xué)生用金屬積木還原故宮角樓模型,榫卯精度達0.1mm,融合傳統(tǒng)建筑技藝與現(xiàn)代力學(xué)分析。編程邏輯訓(xùn)練:低齡學(xué)生用圖形化編程控制仿生機器人行走路徑,學(xué)習(xí)循環(huán)/條件判斷等基礎(chǔ)邏輯;高中生通過ROS套件開發(fā)“智能分揀機械臂”,結(jié)合OpenCV視覺識別算法實現(xiàn)物體分類。競賽與創(chuàng)客項目IRM國際機器人創(chuàng)客大賽:學(xué)生設(shè)計“林火監(jiān)測無人機”,利用紅外傳感器積木模塊實現(xiàn)火源定位,準(zhǔn)確率98%;“災(zāi)區(qū)生命探測機器人”項目通過金屬開源平臺集成超聲傳感與機械臂,獲科技創(chuàng)新。學(xué)生用曲柄連桿機構(gòu)設(shè)計智能伸縮門,結(jié)合限位開關(guān)實現(xiàn)啟停。發(fā)展開源圖形化編程
圖形化編程卡開源指令集,將抽象代碼轉(zhuǎn)化為可觸摸步驟。發(fā)展開源圖形化編程
格物斯坦開源系列的金屬結(jié)構(gòu)件為了保證孩子學(xué)習(xí)機器人編程課程的嚴(yán)謹(jǐn)和準(zhǔn)確,其生產(chǎn)流程嚴(yán)格遵循工業(yè)級質(zhì)量控制:從原材料篩選、數(shù)控編程下料,到彎形卷制與焊接裝配,每一環(huán)節(jié)均需要通過尺寸測量、表面粗糙度檢測及力學(xué)性能測試。尤為關(guān)鍵的是其金屬結(jié)構(gòu)件的六面拼搭設(shè)計,結(jié)構(gòu)件的多向連接面需實現(xiàn)無縫嵌合,任何精度偏差均會導(dǎo)致返工,以此保障拼裝流暢性與機械穩(wěn)定性。這種創(chuàng)新設(shè)計使結(jié)構(gòu)件之間的組合更加豐富多樣,孩子們可以根據(jù)自己的想象搭建自己需要的造型和產(chǎn)品。發(fā)展開源圖形化編程
- 特色創(chuàng)客實驗室加盟 2025-09-20
- GSTEM積木系列編程 2025-09-20
- 國內(nèi)編程教育 2025-09-20
- 專注機器人創(chuàng)新 2025-09-20
- 普及機器人技術(shù)指導(dǎo) 2025-09-20
- 小加圖積木編程課堂 2025-09-20
- 小顆粒積木工廠 2025-09-19
- 比較好的人工智能創(chuàng)客教育 2025-09-19
- AI人工智能學(xué)習(xí) 2025-09-19
- 浙江自主研發(fā)的教育網(wǎng)上學(xué)習(xí) 2025-09-19
- 內(nèi)蒙性價比高的朝鮮大學(xué)外國人研究生特別招生簡章2024學(xué)年有哪些 2025-09-20
- 工廠內(nèi)部物流規(guī)劃咨詢設(shè)計 2025-09-20
- 金壇區(qū)特色服務(wù)體育類培訓(xùn)哪些優(yōu)勢 2025-09-20
- 保山幼兒數(shù)字化音樂教育 2025-09-20
- 江西靠譜的馬來西亞國立大學(xué)碩士培訓(xùn)要多少錢 2025-09-20
- 瑤海區(qū)名優(yōu)數(shù)字教師制作多少錢 2025-09-20
- 頭屯河區(qū)創(chuàng)意爵士舞培訓(xùn)價格咨詢 2025-09-20
- 芬蘭文科類留學(xué)選擇 2025-09-20
- 北京餐飲農(nóng)產(chǎn)品配送系統(tǒng)管理系統(tǒng) 2025-09-20
- GSTEM積木系列編程 2025-09-20