開源算法
格物斯坦通過線上社區(qū)(OMO平臺) 與賽事活動構(gòu)建創(chuàng)新網(wǎng)絡(luò):學(xué)生可共享3D模型、代碼庫(如“全自動象棋機器人”開源方案),復(fù)用成熟模塊聚焦功能優(yōu)化,避免“重復(fù)造輪”;企業(yè)如優(yōu)必選、宇樹科技基于其硬件架構(gòu)二次開發(fā),將傳統(tǒng)需500萬元投入的機械臂原型壓縮至單人5天完成,推動創(chuàng)客成果向產(chǎn)業(yè)轉(zhuǎn)化;全球開發(fā)者通過OpenLoong社區(qū)協(xié)作優(yōu)化ROS驅(qū)動包,形成“個體創(chuàng)造-群體迭代”的飛輪效應(yīng)。格物斯坦開源系列的本質(zhì),是以工業(yè)級的精度(0.01mm結(jié)構(gòu)件)支撐教育級的容錯,以分層的工具鏈(點讀筆→ROS)匹配認知躍遷(具象→抽象→創(chuàng)造),通過開源生態(tài)將碎片化創(chuàng)意整合為系統(tǒng)性解決方案。這種結(jié)合不僅讓小學(xué)生能在48小時內(nèi)完成聲控家居機器人原型,更讓創(chuàng)客教育從“興趣工坊”升維為“未來工程師的孵化器”——在這里,每個孩子既是問題的發(fā)現(xiàn)者,也是變革的創(chuàng)造者。萬向輪底盤設(shè)計優(yōu)化多地形適應(yīng)力,適用于野外勘探項目。開源算法
格物斯坦的開源產(chǎn)品體系是其教育生態(tài)中的亮點,充分體現(xiàn)了“產(chǎn)學(xué)研賽一體化”的品牌理念。這些產(chǎn)品不僅覆蓋了從基礎(chǔ)結(jié)構(gòu)件到高級編程框架的全鏈條技術(shù),更深度融合了STEM教育目標(biāo),為青少年創(chuàng)客提供了可自由探索與創(chuàng)新的開放平臺。在硬件層面,格物斯坦的金屬開源機器人系列是其標(biāo)志性產(chǎn)品。采用鋁合金材料打造的全金屬構(gòu)件支持快速拆裝,具備工業(yè)級精度與耐用性,例如“鐵達摩金屬開源機器人”兼容樂高式積木體系,同時支持舵機、傳感器等模塊的自由擴展,允許學(xué)生從簡單的機械組裝進階至復(fù)雜的仿生機器人開發(fā)。其開源仿生平臺(如仿生蛇、仿生犬)則進一步融入生物力學(xué)與空間自由度設(shè)計,結(jié)合3D打印部件,學(xué)生可通過調(diào)整關(guān)節(jié)參數(shù)模擬生物運動步態(tài),在硬件層面實踐跨學(xué)科知識整合。開源算法學(xué)生用曲柄連桿機構(gòu)設(shè)計智能伸縮門,結(jié)合限位開關(guān)實現(xiàn)啟停。
開源課程中高齡段(13-16歲) 則進階至 開源金屬十合一課程 與 Arduino金屬開源機器人課程。前者分初、中、高三級(共36課時),聚焦工程系統(tǒng)設(shè)計:學(xué)生以Arduino開發(fā)板為主控,學(xué)習(xí)C/C++語法與數(shù)據(jù)結(jié)構(gòu),通過曲柄連桿機構(gòu)、蝸桿傳動等機械原理,完成“顏色分類系統(tǒng)”“柔性制造流水線”等工業(yè)級原型開發(fā),并掌握萬用表、示波器等工具的使用。后者則深入仿生學(xué)與人工智能領(lǐng)域——例如設(shè)計“仿生蜘蛛”時需協(xié)調(diào)12自由度舵機運動,調(diào)用陀螺儀數(shù)據(jù)實現(xiàn)動態(tài)平衡;而“人形機器人”項目結(jié)合OpenCV視覺庫與YOLO目標(biāo)檢測算法,實現(xiàn)物體抓取的毫米級精度控制。
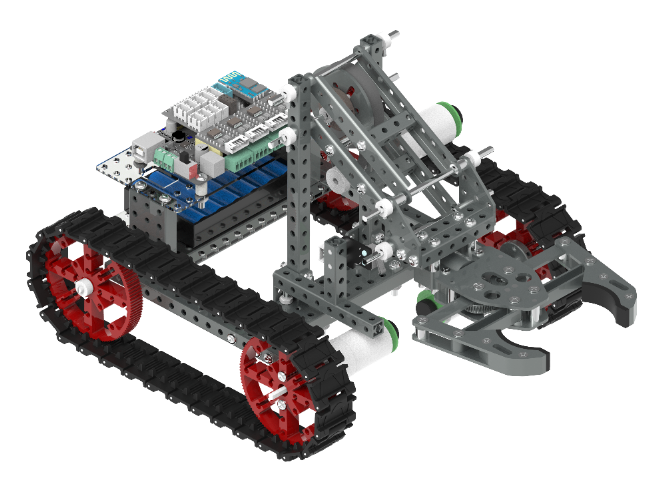
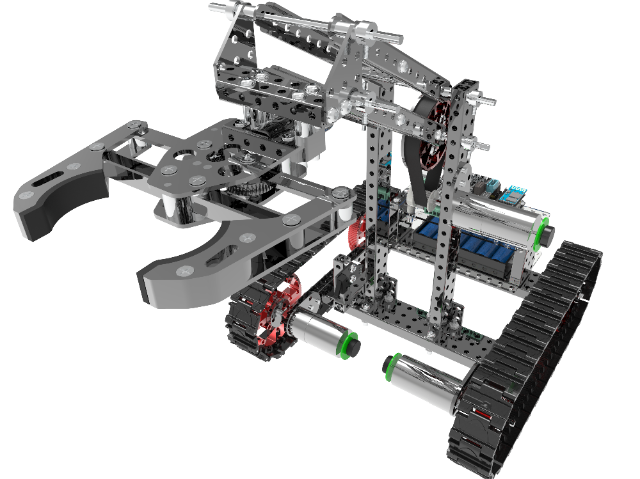
格物斯坦的開源系列機械手臂是其教育機器人生態(tài)中的高階**組件,深度融合了工業(yè)級硬件精度與開源軟件生態(tài),專為13-16歲青少年及高校科研場景設(shè)計,旨在通過真實項目實踐培養(yǎng)系統(tǒng)性工程思維與創(chuàng)新能力。格物斯坦開源機械手臂不僅是技術(shù)訓(xùn)練工具,更是“產(chǎn)學(xué)研賽一體化”戰(zhàn)略的載體。它以工業(yè)級精度硬件(0.01mm結(jié)構(gòu)件)與全棧式軟件生態(tài)(圖形化至ROS)為雙核,既讓青少年在“造物”中理解機械動力學(xué)與AI算法本質(zhì),又通過開源社區(qū)(如OpenLoong)推動全球開發(fā)者協(xié)作優(yōu)化。隨著國家“格物”通用具身智能平臺的發(fā)布,該系列機械手臂將進一步融入多機協(xié)作與語言交互生態(tài),成為培養(yǎng)未來機器人工程師的基礎(chǔ)設(shè)施。 開源技術(shù)降低了創(chuàng)業(yè)門檻,讓創(chuàng)新更普惠??。
格物斯坦開源系列的機械手臂的軟件生態(tài)覆蓋從圖形化編程到工業(yè)級開發(fā)的完整路徑:低門檻開發(fā):通過GScratch軟件(基于Scratch 2.0優(yōu)化)拖拽“舵機角度”“視覺識別”等積木塊,學(xué)生可快速實現(xiàn)基礎(chǔ)動作控制;軟件支持一鍵將圖形代碼轉(zhuǎn)譯為Arduino C語言,降低高階開發(fā)的學(xué)習(xí)曲線。高階智能融合:結(jié)合ROS框架,機械手臂可運行多模態(tài)AI任務(wù)。例如集成YOLO目標(biāo)檢測模型實現(xiàn)動態(tài)分揀(如物流包裹分類),或通過強化學(xué)習(xí)算法優(yōu)化抓取路徑,在工業(yè)分揀場景中達到毫米級操作精度。仿真與現(xiàn)實協(xié)同:依托“格物”具身智能仿真平臺,學(xué)生可先在虛擬環(huán)境中預(yù)演機械臂運動策略(如抗擾控制、負載優(yōu)化),再部署至實體硬件驗證。例如在模擬八級強風(fēng)環(huán)境中測試動態(tài)平衡,或驗證50公斤負重下的結(jié)構(gòu)穩(wěn)定性,大幅壓縮研發(fā)周期。移動端App實現(xiàn)遙控、語音控制及“你畫我跑”等交互玩法。生態(tài)開源系統(tǒng)
IRM大賽開源林火監(jiān)測無人機方案,紅外定位誤差<2米。開源算法
開源課程以C/C++語言為重點,學(xué)生從流程圖設(shè)計入手,逐步進階至工業(yè)級代碼開發(fā)。課程通過GLP圖形化軟件實現(xiàn)編程邏輯的可視化過渡——例如拖拽“舵機角度”“環(huán)境光強度”等積木塊生成控制指令,并一鍵轉(zhuǎn)譯為Arduino代碼,降低高階語言的學(xué)習(xí)門檻。在高級階段,學(xué)生需編寫算法控制多自由度系統(tǒng),如為“螳螂機器人”設(shè)計捕食邏輯:通過陀螺儀數(shù)據(jù)檢測身體傾斜度,結(jié)合超聲測距觸發(fā)機械臂抓取動作,實現(xiàn)仿生行為的動態(tài)響應(yīng)。課程導(dǎo)向復(fù)雜系統(tǒng)的原型開發(fā),如“顏色分類系統(tǒng)”需融合OpenCV視覺識別與機械臂控制,通過YOLO模型區(qū)分物體顏色并指揮分揀機構(gòu)完成毫米級操作;“柔性制造流水線”則需協(xié)調(diào)傳送帶電機、機械爪與紅外計數(shù)模塊,模擬工業(yè)自動化流程。這些項目不僅要求學(xué)生貫通機械動力學(xué)與傳感技術(shù),更需運用工程迭代思維——在“格物”仿真平臺預(yù)演抗強風(fēng)、高負載場景,再通過示波器監(jiān)測實體硬件運行參數(shù),優(yōu)化代碼與結(jié)構(gòu)設(shè)計,壓縮研發(fā)周期。開源算法
- 特色創(chuàng)客實驗室加盟 2025-09-20
- 普及機器人技術(shù)指導(dǎo) 2025-09-20
- 小加圖積木編程課堂 2025-09-20
- 小顆粒積木工廠 2025-09-19
- 比較好的人工智能創(chuàng)客教育 2025-09-19
- AI人工智能學(xué)習(xí) 2025-09-19
- 浙江自主研發(fā)的教育網(wǎng)上學(xué)習(xí) 2025-09-19
- 創(chuàng)客人工智能總結(jié) 2025-09-19
- 浙江培養(yǎng)編程創(chuàng)客實驗室思維培養(yǎng) 2025-09-19
- 0基礎(chǔ)學(xué)習(xí)開源 2025-09-19
- 保山幼兒數(shù)字化音樂教育 2025-09-20
- 江西靠譜的馬來西亞國立大學(xué)碩士培訓(xùn)要多少錢 2025-09-20
- 芬蘭文科類留學(xué)選擇 2025-09-20
- 北京餐飲農(nóng)產(chǎn)品配送系統(tǒng)管理系統(tǒng) 2025-09-20
- 乳山哪里有威海企業(yè)再造 2025-09-20
- 沙依巴克區(qū)青少年民族舞街舞培訓(xùn)怎么加盟 2025-09-20
- 烏魯木齊現(xiàn)代民族舞街舞培訓(xùn)適合多大的孩子 2025-09-20
- 芬蘭初中留學(xué)多少錢 2025-09-20
- 河南本科出國留學(xué)需要哪些材料 2025-09-20
- 廣東碼垛工業(yè)機器人培訓(xùn)客服電話 2025-09-20