影響開源自動化桌面物聯網
格物斯坦這套開源課程的優勢在于 “產學研賽一體化”生態:工具鏈貫通:從圖形化編程(GScratch)到工業級開發(ROS/Arduino),學生可在“格物”仿真平臺預演算法(如抗強風機械臂運動策略),再部署至實體硬件驗證,壓縮研發周期;場景化創新:課程嵌入真實社會議題,如山區學生開發“智能澆花系統”,通過土壤濕度傳感器觸發機械臂灌溉指令,或參與IRM國際機器人創客大賽,設計火源定位誤差小于2米的林火監測無人機;開源社區協作:OpenLoong平臺共享3D模型與代碼庫(如“全自動象棋機器人”方案),學生可復用成熟模塊聚焦功能優化,而企業如優必選、宇樹科技亦基于其硬件架構二次開發,將傳統需500萬元投入的機械臂原型壓縮至單人5天完成。萬向輪底盤開源設計,多地形適應力賦能野外勘探項目。影響開源自動化桌面物聯網
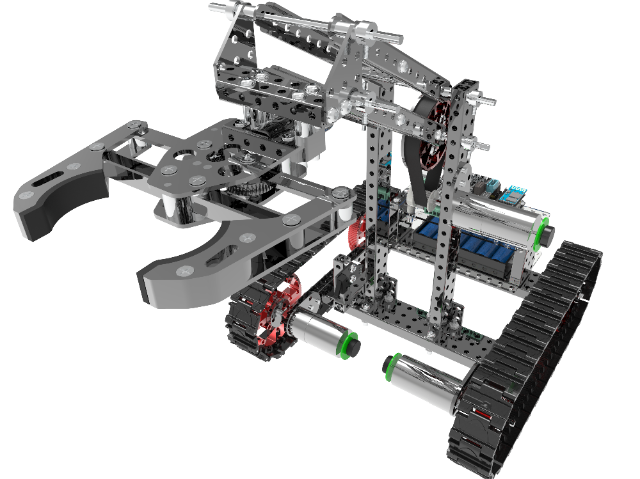
格物斯坦的開源金屬結構件以0.01毫米公差精度(工業級標準)和鋁合金材質為主,支持反復拆裝而不變形,同時預留標準化接口(I2C、UART、GPIO),兼容300余種電子模塊(如超聲傳感器、溫濕度傳感器、舵機等)。這種設計讓學生無需專業工具即可徒手搭建復雜機械系統(如六足仿生螞蟻或智能澆花機械臂),既保障了工程可靠性,又極大降低了物理實現的壁壘。例如,山區學生可利用土壤濕度傳感器觸發機械臂灌溉指令,解決農業實際問題;高中生則能開發“林火監測無人機”,通過紅外傳感器實現火源定位誤差小于2米。影響開源自動化桌面物聯網萬向輪底盤設計優化多地形適應力,適用于野外勘探項目。
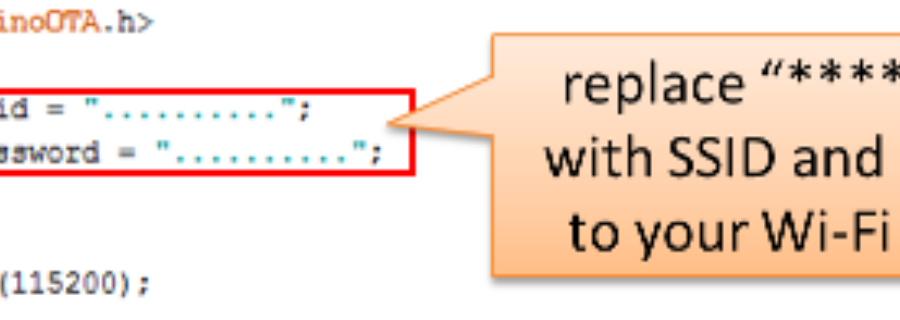
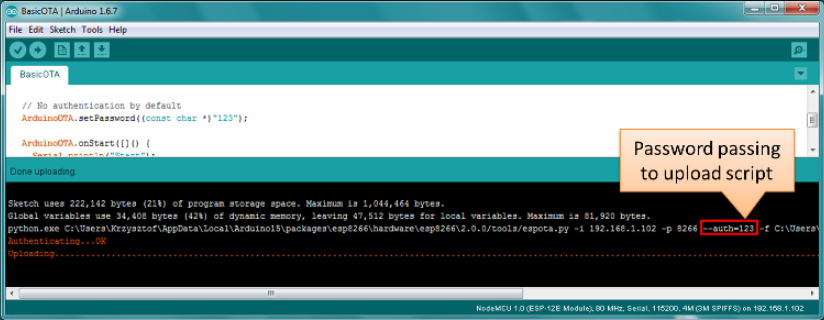
在軟件與編程工具領域,格物斯坦構建了多層級開源生態。是基于Scratch2.0深度優化的Gscratch圖形化編程軟件,不僅保留拖拽積木式編程的易用性,更創新性地加入硬件交互模塊,可直接控制開源機器人執行動作,并支持圖形化代碼一鍵轉換為ArduinoC語言,為高階學習者提供平滑過渡路徑。同時,公司適配國際主流開源框架,如集成ROS(RobotOperatingSystem)開發套件,提供傳感器驅動、運動控制等底層庫函數,高中生可通過Python或C++編寫自主導航算法,在Gazebo仿真環境中預演機器人行為,再部署至實體硬件驗證。這種“虛擬-實體”聯動的開發模式大幅降低了機器人算法的試錯成本。
格物斯坦與上海大學、清華大學共建“清華-上大機器藝術與具身智能實驗室”,由上海大學副教授葉林奇領銜,聚焦具身智能、機器人運動控制與仿真技術的前沿研究。該實驗室開發的“格物”具身智能仿真平臺成為標志性成果——通過集成通用強化學習框架與模型自動化適配技術,實現“一套代碼適配百余款機器人”,新機型導入即可訓練,無需重復編程,徹底顛覆傳統研發流程。復旦大學亦深度參與技術驗證,其自主研制的“光華一號”人形機器人依托該平臺優化運動算法,將行走、抓取等功能的開發周期從3個月壓縮至數天。此外,平臺與UnityRLPlayground開源框架的融合,進一步降低了開發門檻,支持從仿真訓練到實體部署的全流程自動化。兼容開源第三方傳感器(指南針、陀螺儀),支持跨學科創新實驗。
開源系列鮮明的特質在于其全棧開放的設計哲學。硬件上,產品采用鋁合金機身,支持快速拆裝,機械結構、電子模塊、軟件接口均遵循模塊化設計原則。這種設計不僅賦予產品工業級的耐用性,更讓學習者能像工程師一樣自由組合傳感器、控制器與執行器,例如通過兼容Arduino擴展板接入溫濕度傳感器或舵機,或將Scratch圖形化程序無縫轉化為Arduino代碼進行底層優化。軟件層面,Gscratch編程平臺在繼承Scratch 2.0易用性的同時,深度整合了硬件交互模塊——學生拖拽“超聲波避障”積木塊時,實際是在操控GC-500控制器驅動真實傳感器,而平臺提供的“代碼可視化”功能可一鍵將圖形程序轉為C語言,實現從可視化編程到工業級開發的平滑過渡。這種“圖形化入門、代碼級深入”的雙軌設計,既降低了學習門檻,又為高階探索保留了空間。格物斯坦項目開源增強公共責任與協作解決能力??。開源課程
社區創客空間標配格物斯坦開源套件,鼓勵民間創新。影響開源自動化桌面物聯網
這些控制器與格物斯坦的 “產學研賽一體化”戰略深度融合——GC-500已應用于IRM國際機器人創客大賽,支撐青少年開發出火源定位誤差小于2米的“災區生命探測機器人”;高校團隊則依托GC-600的ROS兼容性,在“格物”仿真平臺中預演雙足機器人抗八級強風的運動策略,再將算法部署至實體硬件驗證,大幅壓縮研發周期。從幼兒指尖的點讀筆到青少年手中的ROS開發板,格物斯坦以一套梯度化、開源化、工業化的控制器體系,讓每個年齡段的創造者都能找到技術支點,在真實問題解決中錘煉從邏輯思維到系統工程的素養。影響開源自動化桌面物聯網
- 自主研發機器人創客大賽 2025-09-21
- 附近人工智能供應商家 2025-09-21
- 少兒人工智能機構 2025-09-21
- K12編程算法實踐 2025-09-21
- 啟蒙編程哪些優勢 2025-09-21
- 積木玩法 2025-09-21
- 附近人工智能基礎 2025-09-21
- 格物斯坦人工智能共同合作 2025-09-21
- 兒童邏輯思維編程控制器研發 2025-09-21
- 刷卡編程教育重點 2025-09-21
- 山西做的好的新加坡國立大學-碩士哪個正規 2025-09-21
- 常州哪里有綜合素養方法 2025-09-21
- 應屆生專升本什么時候報名 2025-09-21
- 新市區進階HipHop培訓怎么報名 2025-09-21
- 武進區有哪些語言能力培訓服務保證 2025-09-21
- 鹽田本地太極拳扇 2025-09-21
- 宜興企業管理咨詢服務 2025-09-21
- 天津哪里有企業管理咨詢服務 2025-09-21
- 濰城區企業家沙龍培訓計劃 2025-09-21
- 瑤海區附近數字課程制作銷售 2025-09-21