主動安全一體機系統(tǒng)|360全景智防安全觸控一體機系統(tǒng)|360全景盲區(qū)安全顯控一體機系統(tǒng)
一、主動安全一體機系統(tǒng)概述
主動安全一體機(KT-AI-360)是一款顯控一體化、高度集成的智能安全系統(tǒng),集成了360°全景影像(AVM)和盲區(qū)監(jiān)測預(yù)警(BSD)功能,適用于工業(yè)車輛(如叉車、工程車等)的復(fù)雜作業(yè)環(huán)境,有效提升駕駛安全性和操作效率。
1.1 系統(tǒng)組成
主控制器:集成于10.1寸IPS高清觸控屏中
攝像頭:4~6路廣角攝像頭(支持1080P分辨率)
報警裝置:外置聲光報警器
擴展接口:CAN總線、GPS、4G、雷達、胎壓等信號接入
二、基礎(chǔ)功能詳解
2.1 360°全景影像系統(tǒng)(AVM)功能說明:通過安裝在車輛四周的4~6個廣角攝像頭,實時采集車輛周邊影像,經(jīng)過圖像拼接與矯正處理,生成360°全景俯視圖,呈現(xiàn)在中控屏上,幫助駕駛員清晰掌握車輛周圍環(huán)境。

技術(shù)優(yōu)勢:
支持 1080P高清視頻輸入
水平視場角 200°,垂直 110°
支持 4~6路視頻拼接
實時圖像矯正與融合,無拼接縫隙。
應(yīng)用價值:
減少盲區(qū)導(dǎo)致的碰撞事故
提高狹窄空間內(nèi)的操作精度
適用于泊車、倒車、復(fù)雜路面通行等場景
2.2 盲區(qū)監(jiān)測預(yù)警系統(tǒng)(BSD)
功能說明:基于360全景攝像頭采集的視頻,利用AI算法對車輛盲區(qū)范圍內(nèi)的行人、車輛、障礙物進行實時識別、跟蹤與預(yù)警。系統(tǒng)支持二級預(yù)警機制,可根據(jù)距離遠近設(shè)定不同級別的報警。


技術(shù)參數(shù):
支持 AI識別與跟蹤
支持 一級/二級預(yù)警
可設(shè)置 自定義報警區(qū)域
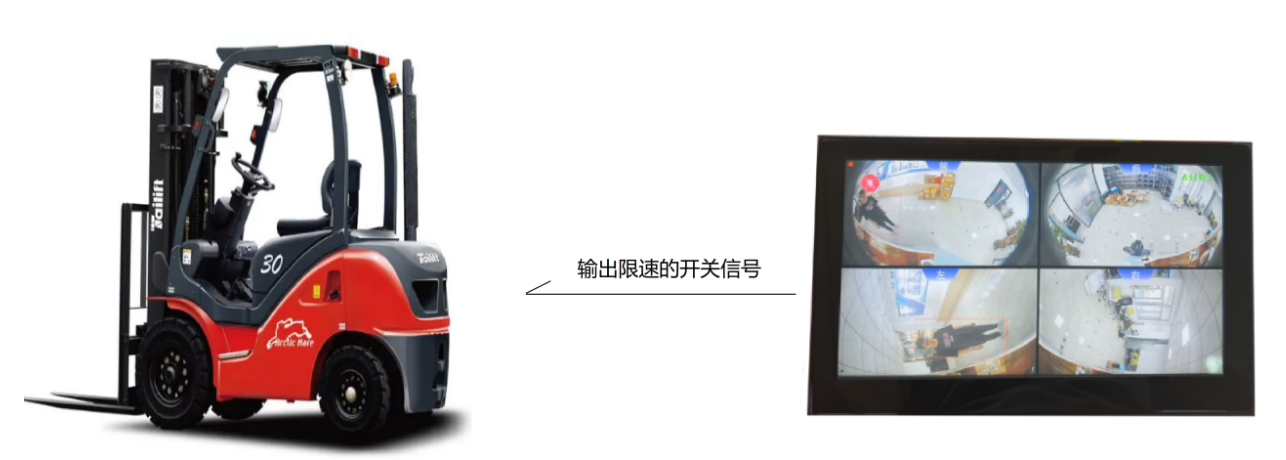
支持 輸出限速開關(guān)信號
應(yīng)用價值:
在高速行駛或駕駛員分心時自動預(yù)警
防止因盲區(qū)造成的側(cè)面碰撞
提升復(fù)雜環(huán)境下的行車安全
2.3 外置語音告警裝置
功能說明:當(dāng)系統(tǒng)檢測到有行人或障礙物進入盲區(qū)時,自動觸發(fā)語音告警(如“大車危險”)和LED閃光燈,同時聯(lián)動車內(nèi)顯示屏放大相關(guān)攝像頭畫面,提醒駕駛員注意避讓。

技術(shù)參數(shù):
輸入電壓:12V
輸出方式:聲音+LED閃光
支持 與車內(nèi)系統(tǒng)聯(lián)動
應(yīng)用價值:多感官提醒,提升預(yù)警效果
適用于嘈雜環(huán)境下的作業(yè)場景
2.4 限速開關(guān)信號輸出
功能說明:在BSD系統(tǒng)檢測到行人進入一級預(yù)警區(qū)域時,系統(tǒng)可輸出限速開關(guān)信號,用于控制車輛自動降速,防止因駕駛員反應(yīng)不及時而發(fā)生碰撞。
 技術(shù)參數(shù):
技術(shù)參數(shù):
輸出電壓:24V/12V
比較大電流:500mA
支持 與車輛控制系統(tǒng)聯(lián)動
應(yīng)用價值:實現(xiàn)主動干預(yù)式安全控制
降低突發(fā)危險情況下的事故率
2.5 行車視頻記錄功能
功能說明:支持通過 SD卡(比較大256GB) 對車輛行駛過程中的視頻進行本地記錄,便于事故回溯與責(zé)任認(rèn)定。
 技術(shù)參數(shù):
技術(shù)參數(shù):
支持 1280×720@60fps
存儲格式:H.264
支持 斷電續(xù)錄、循環(huán)覆蓋
應(yīng)用價值:
安全事件回放分析
提供法律依據(jù),提升管理效率
三、拓展功能及可定制化能力
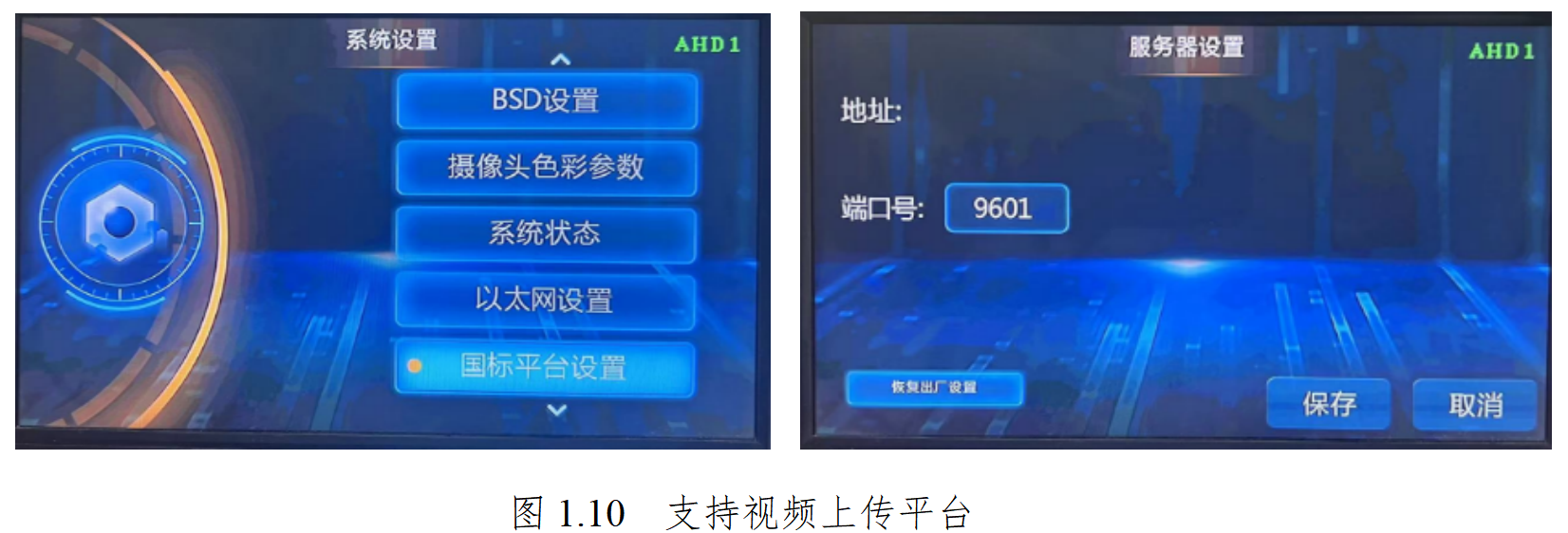
3.1 支持4G網(wǎng)絡(luò)與GPS定位
功能說明:
高配版支持 4G全網(wǎng)通 和 GPS+北斗雙模定位,可將視頻數(shù)據(jù)上傳至企業(yè)運營平臺,實現(xiàn)遠程監(jiān)控與調(diào)度管理。
 可定制化內(nèi)容:
可定制化內(nèi)容:
視頻上傳頻率與分辨率
GPS軌跡記錄與回放
與企業(yè)車輛管理平臺對接
應(yīng)用價值:
實現(xiàn)遠程安全監(jiān)管
支持車隊調(diào)度與數(shù)據(jù)分析
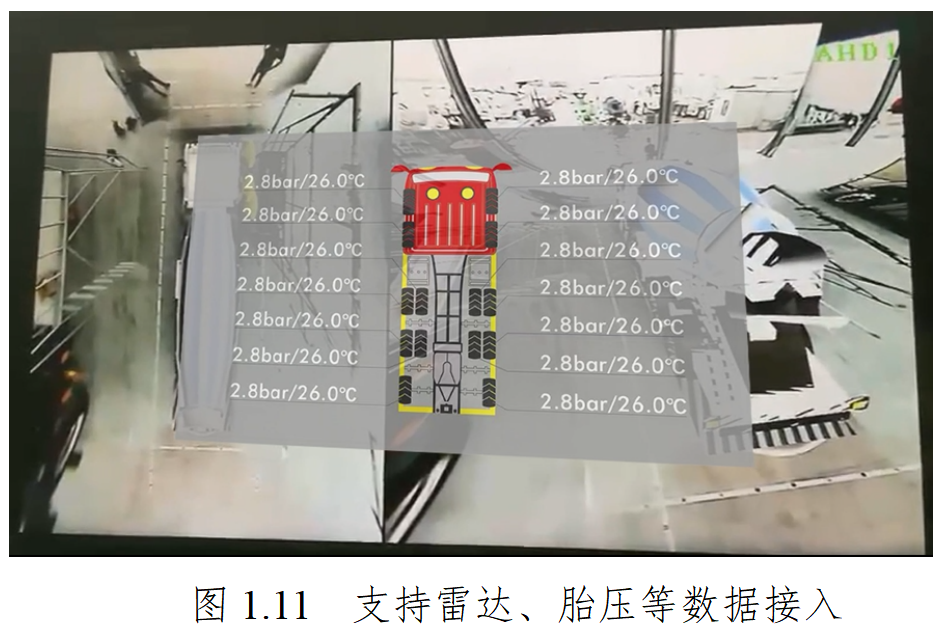
3.2 融合雷達、胎壓等傳感器信號
功能說明:系統(tǒng)支持接入 雷達、胎壓監(jiān)測系統(tǒng)(TPMS)等第三方傳感器,實現(xiàn)多源數(shù)據(jù)融合分析,提升整體安全等級。
 可定制化內(nèi)容:
可定制化內(nèi)容:
雷達數(shù)據(jù)融合邏輯
胎壓異常自動報警
多傳感器聯(lián)動策略
應(yīng)用價值:
構(gòu)建多維安全感知系統(tǒng)
實現(xiàn)全車狀態(tài)實時監(jiān)控
四、典型應(yīng)用場景
4.1 工業(yè)園區(qū)內(nèi)部物流車輛
應(yīng)用場景描述:在園區(qū)內(nèi)部,叉車、工程車頻繁穿梭于倉庫、貨架之間,空間狹小、視線受限、行人穿行頻繁,極易發(fā)生碰撞事故。
系統(tǒng)作用:
AVM系統(tǒng)幫助駕駛員清晰判斷貨架與車輛距離
BSD系統(tǒng)實時監(jiān)測行人與貨物,提前預(yù)警
限速信號輸出防止車輛誤入危險區(qū)域
4.2 城市道路工程車輛作業(yè)
應(yīng)用場景描述:工程車如灑水車、垃圾車等在城市道路上作業(yè),周邊環(huán)境復(fù)雜,盲區(qū)多,易與行人、電動車發(fā)生碰撞。
系統(tǒng)作用:
AVM系統(tǒng)幫助駕駛員觀察車身四周
BSD系統(tǒng)識別盲區(qū)行人、電動車,自動報警
語音告警裝置提醒周邊人員注意避讓
4.3 港口碼頭集裝箱運輸車輛
應(yīng)用場景描述:港口環(huán)境復(fù)雜,集裝箱堆疊高大,車輛轉(zhuǎn)彎半徑大,盲區(qū)嚴(yán)重,容易造成側(cè)翻或碰撞事故。
系統(tǒng)作用:
全景影像幫助駕駛員判斷集裝箱間距
BSD系統(tǒng)識別盲區(qū)行人與貨物
限速信號聯(lián)動防止高速轉(zhuǎn)彎側(cè)翻
五、總結(jié)


- 鏟車360環(huán)視攝像頭雷達預(yù)警 2025-09-20
- 挖掘機8路360全景開發(fā)商 2025-09-20
- 廣東360全景環(huán)視系統(tǒng)廠家供應(yīng) 2025-09-20
- 履帶吊360全車可視系統(tǒng)品牌 2025-09-20
- 廣東360度全景攝像頭廠家直銷 2025-09-20
- ADAS+360全景環(huán)視設(shè)備安裝 2025-09-20
- 攪拌車360影像系統(tǒng)價格 2025-09-20
- 鏟車360全景環(huán)視系統(tǒng)開發(fā)商 2025-09-20
- 廣東mdvr司機行為檢測預(yù)警系統(tǒng) 2025-09-19
- 中國澳門疲勞駕駛預(yù)警系統(tǒng)聯(lián)系方式 2025-09-19
- 安徽宇通大巴57座汽車租賃資費 2025-09-20
- 安徽拖掛房車汽車租賃平臺 2025-09-20
- 青浦區(qū)常見汽摩配件圖片 2025-09-20
- 寧波寶馬全系牌照板價格 2025-09-20
- 動態(tài)密封圈參考價 2025-09-20
- 北京加工汽車座椅調(diào)節(jié)開關(guān) 2025-09-20
- 電機密封圈包裝 2025-09-20
- 貴州割草機油門拉索推薦貨源 2025-09-20
- 浦東新區(qū)質(zhì)量汽摩配件圖片 2025-09-20
- 汽車電子應(yīng)用導(dǎo)熱膠GFC3500LV耐溫范圍 2025-09-20