四川專業視頻壓縮與傳輸山區
對于機器人的未來發展而言,靈活性的提升是下一個方向。當下的機器人頭部產品中無論是宇樹科技還是特斯拉的,都多多少少面臨這個問題。機器人控制模塊的發展直接決定著遠程控制機器人進行工作時的延遲,進而展現出不同的靈活程度。LLSM低延遲低延遲低帶寬流媒體傳輸模塊,模塊基于RK3588圖像傳感器,植入GS遠程可視化低延時實時控制系統,采用自研軟解技術以及單向視頻傳輸和雙方指令交互的裝備,系統硬件只需1個前端視頻服務器。當SDI視頻≤4路時,硬件模塊(或板卡)尺寸小、功耗低。同時顯控終端不需額外的解碼硬件。LLSM低延遲低帶寬流媒體傳輸模塊依托于RK3588圖像處理板實現圖傳控制。四川專業視頻壓縮與傳輸山區
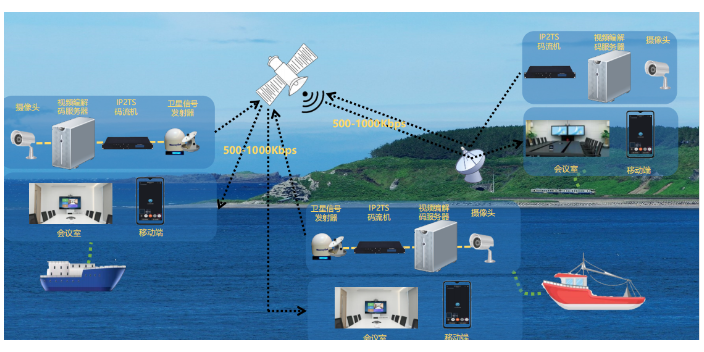
視頻壓縮與傳輸
對于低空飛行器,如無人機物流配送、載人飛行器等,實時獲取和處理周圍環境的視頻信息至關重要。低延遲的視頻編解碼模塊能快速將飛行器攝像頭采集的視頻數據編碼傳輸至地面控制中心或其他相關設備,同時將控制指令等視頻信息快速解碼呈現給操作人員,使操作人員及時了解飛行器周邊情況并做出準確決策,保障飛行安全,避免碰撞等事故。在低空經濟的多種應用中,如空中執法、應急救援等,實時的視頻信息對于指揮決策和行動執行非常關鍵。低延遲的視頻編解碼模塊可實現視頻數據的快速傳輸與處理,使指揮中心能實時掌握現場情況,高效指揮調度,提高業務執行的效率和準確性。貴州窄帶視頻壓縮與傳輸交互系統穩定500K帶寬的遠程控制技術。
隨著國家對低空經濟重視程度的提升,低空經濟高速發展的時代已經到來,一些經濟相對發達的省、市,例如浙江和上海等地,已經做出了比較詳細的應用規劃,相關的技術部門也在深入研究相關的技術保障問題,其中隨著低空無人、有人裝備的增加,空中裝備之間、空地之間的帶寬問題將會成為一個關鍵的制約因素,因此低帶寬、低延遲視頻編解碼技術成為必須要突破的技術瓶頸。低空環境中,特別是在多架低空飛行器同時作業等場景下,無線網絡的帶寬資源相對緊張。低帶寬視頻編解碼技術可在有限帶寬下,通過優化編碼算法,去除視頻數據中的冗余信息,高效壓縮視頻數據,低延遲控制,確保多架飛行器或多個低空設備間的視頻數據能順暢傳輸,避免因帶寬不足導致數據堵塞、傳輸中斷等問題。
慧視LLSM低延遲低帶寬流媒體傳輸模塊基于RK3588圖像處理板,植入我司自研的GS遠程可視化低延遲實時圖傳控制系統,能夠實現在500K帶寬環境下進行穩定的流媒體傳輸,且延遲在50ms左右(不含數據鏈)。將模塊植入無人挖掘機系統中,就可以通過5G等網絡實現在操控室遠程低延遲操控多個無人挖掘機同時進行工作,整個鏈路延遲在50ms左右,不會出現卡頓。此外,終端控制中心能夠實時查看多路無人挖掘機前端視頻,視頻質量為高清,且多個無人挖掘機同時回傳數據占用的帶寬也在500K左右。視頻壓縮能夠有效減少視頻的存儲成本。

整個LLSM流媒體傳輸模塊集控制、帶寬壓縮、AI圖傳等于一體,有效減少了項目整合所需要的時間。圖像傳輸的延遲于相機、后端設備的性能密切相關,在我司進行產品選擇開發的過程中,MIPI工業相機SC130GS,表現的很出色,在不斷的測試中,電腦屏幕刷新率180Hz不變的情況下,相機幀率為60fps時,傳輸延遲在50~65ms左右;相機幀率為120fps時,傳輸延遲在40~55ms左右;相機幀率在240fps時,傳輸延遲比較低可達30ms左右。使用者可以根據需求選擇不同的方案。低延遲低帶寬的視頻壓縮傳輸方案!甘肅倉儲視頻壓縮與傳輸專業方案
如何有效控制視頻傳輸帶寬?四川專業視頻壓縮與傳輸山區
隨著無人設備的應用越來越多,遠程控制技術也在不斷革新。其中延時時間作為一個關鍵指標,直接決定著遠程控制無人設備等的綜合性能。因此,低帶寬、低延遲的視頻編解碼技術成為必須要突破的技術。編碼延時與編碼方式以及編碼器性能相關:–采用純CPU編碼的方式,耗時會比較大。–采用MCU內部自帶的硬件編碼器,耗時較短。–硬件編碼器性能越強,耗時越短。解碼延時與解碼方式以及解碼器性能相關:–采用純CPU解碼的方式,耗時會比較大。–采用硬件解碼器,耗時較短。–硬件解碼器性能越強,耗時越短。四川專業視頻壓縮與傳輸山區
- 廣東省時省力目標識別辦公平臺 2025-09-20
- 江西視頻目標識別辦公軟件 2025-09-20
- 海南企業目標識別辦公平臺 2025-09-20
- 江蘇無源目標識別鄭重承諾 2025-09-20
- 湖南高性能目標識別聯系方式 2025-09-20
- 北京圖像處理板誠信合作 2025-09-20
- 云南圖像處理板聯系方式 2025-09-20
- 天津智能化目標識別系統 2025-09-20
- 海南圖像處理板聯系方式 2025-09-20
- 陜西目標跟蹤進貨價 2025-09-20
- 淄博智能化電力監控系統軟件 2025-09-20
- 青山區耐用企業智慧管理平臺開發質量 2025-09-20
- 北斗衛星定位電話 2025-09-20
- 河北電子圍欄解決 2025-09-20
- 廈門井下防爆手機 2025-09-20
- npn常開接近開關 2025-09-20
- 廣東省時省力目標識別辦公平臺 2025-09-20
- 蘇州公安局無人機平臺 2025-09-20
- 云南配電模擬屏價格 2025-09-20
- 江西視頻目標識別辦公軟件 2025-09-20