浙江自主可控圖像標注技術
騰訊開發的機器人小五,采用輪、腿、足復合設計,使得它具備越障能力的同時,也保持了輪式機器人的運行效率。每條腿都可以單獨伸長縮短,能有效提升承載能力。裝上了雙編碼器大扭矩密度的執行器后,就能承受住一般成年人的重量。將機器人用于養老服務領域,能夠幫老人取快遞,抱老人起床,帶老人進行活動。機器人內置RGBD相機,在圖像處理板的賦能下,能夠實時檢測周邊環境,進行路線規劃和避障,以高效完成各項工作指令。同時能夠對物體進行AI識別,判斷老人位置、行為動作,為老人的行動做出幫助。SpeedDP獲得了行業青睞。浙江自主可控圖像標注技術
YOLO系列算法目前更新到YOLOv8。Yolo系列算法是典型的onestage算法,同樣,在算法設計上也注重目標區域的檢測以及特征的分類,這里目標區域的檢測采用的是和圖像區域分類定位的方式實現的。Yolo系列算法是一種比較成熟的目標檢測算法框架,基于這種框架的算法還在不斷地迭代中,當然解決的問題也越來越細化,比如候選區精度、比如小尺度檢測等。基本上YoloV3及以上版本的算法可以在很多場景下得到現實應用。2023年1月,目標檢測經典模型YOLO系列再添一個新成員YOLOv8,這是Ultralytics公司繼YOLOv5之后的又一次重大更新。YOLOv8一經發布就受到了業界的廣關注,成為了這幾天業界的流量擔當。浙江自主可控圖像標注技術節約解放圖像算法工程師的時間。

物體的識別主要指的是對三維世界的客體及環境的感知和認識,屬于高級的計算機視覺范疇。它是以數字圖像處理與識別為基礎的結合人工智能、系統學等學科的研究方向,其研究成果被廣泛應用在各種工業及探測機器人上。隨著計算機及信息技術的迅速發展,圖像識別技術的應用逐漸擴大到諸多領域,尤其是在面部及指紋識別、衛星云圖識別及臨床醫療診斷等多個領域日益發揮著重要作用。通常圖像識別技術主要是指采用計算機按照既定目標對捕獲的系統前端圖片進行處理,在日常生活中圖像識別技術的應用也十分普遍,比如車牌捕捉、商品條碼識別及手寫識別等。隨著該技術的逐漸發展并不斷完善,未來將具有更加廣泛的應用領域。
而維修機器人則能夠通過圖像識別、精細遠程控制技術,實現遠程快速維修,通過加裝高性能圖像處理板,機器人能夠精細電網缺陷以及損壞程度,并通過攝像頭實時回傳高清畫面,工程師只需要遠程操控機器人進行修補,實現精細縫合。整個過程只需要極少數的人員參與,整個巡檢維修的時間能夠從7小時縮減到1小時,極大地保障了電力供應。成都慧視光電采用RK3588開發而成的Viztra-HE030圖像處理板,具備八核處理器,采用BTB傳輸接口,擁有極強傳輸能力,成都慧視能夠憑借豐富的經驗,快速集成開發SDI、CVBS、DVP、LVDS、cameralink等接口以及金屬外殼和散熱器。通過6.0TOPS的算力,以及豐富的接口定制,板卡能夠快速適配不同的無人機和機器人,用在我國西部電力運維領域,將是工程師打造智能化維護的關鍵技術。AI算法訓練平臺SpeedDP。
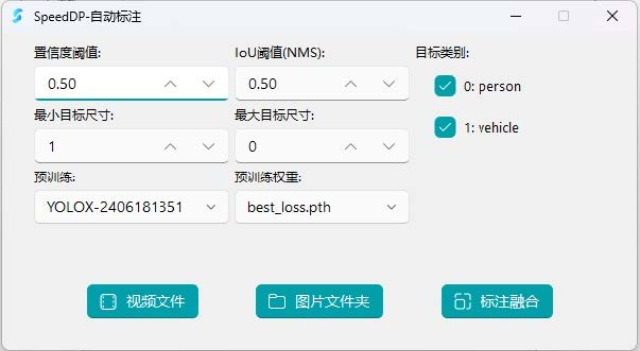
目前,有許多功能性AI工具可以幫助我們進行圖像標注,其中慧視SpeedDP是針對AI零基礎用戶的低門檻AI開發平臺,提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。SpeedDP提供豐富的算法參數設置接口,滿足不同用戶業務場景的定制化需求。此外,慧視SpeedDP開發平臺支持本地化服務器部署,數據敏感的用戶也無需擔心數據信息泄露的問題。目前慧視SpeedDP開發平臺主要提供目標檢測算法的開發功能,不同的用戶可針對自己的業務場景進行AI算法的定制化開發以及算法模型的快速迭代優化。SpeedDP獲得了眾多算法工程師的青睞。四川多系統適配圖像標注功能
SpeedDP有4+3的功能組合,為不同需求的客戶提供定制化服務。浙江自主可控圖像標注技術
慧視光電推出的SpeedDP深度學習算法開發平臺支持labelimg數據標注格式,用戶采集得到圖像數據后使用labelimg工具進行數據標注,然后將圖像文件和標注文件按如圖2所示指定的形式存放即可直接用于模型訓練。一般不同的業務場景需求對應不同的數據和算法參數設置,慧視SpeedDP深度學習算法開發平臺采用項目配置的方式來對不同的業務需求進行管理。采集數據后,能夠批量加載一定數量的數據并進行合并后輸入模型,實時顯示訓練記錄,并能以文件的形式保存運行時訓練參數。浙江自主可控圖像標注技術
- 廣東省時省力目標識別辦公平臺 2025-09-20
- 江西視頻目標識別辦公軟件 2025-09-20
- 海南企業目標識別辦公平臺 2025-09-20
- 江蘇無源目標識別鄭重承諾 2025-09-20
- 湖南高性能目標識別聯系方式 2025-09-20
- 天津智能化目標識別系統 2025-09-20
- 快速目標識別控制軟件 2025-09-20
- 青海數據目標識別售價 2025-09-20
- 海南國產目標識別經驗豐富 2025-09-19
- 吉林省時省力目標識別編號 2025-09-19
- 江西藍牙音響芯片ATS3031 2025-09-20
- 梁溪區如何無線通信推薦貨源 2025-09-20
- 常熟本地毫米波測風雷達質量 2025-09-20
- 海南企業目標識別辦公平臺 2025-09-20
- 江西微機防誤微機五防價格 2025-09-20
- 深圳接線定位器 2025-09-20
- 松江區定制數據集成服務價目 2025-09-20
- 儀控核電測控設備主流供應商 2025-09-20
- 宿遷如何智能感知終端設備大概價格多少 2025-09-20
- 重慶配電模擬屏 2025-09-20