-
《電接點(diǎn)壓力表應(yīng)用場(chǎng)景詳解與使用維護(hù)說(shuō)明書(shū)》
-
挑選隔膜壓力表,如何科學(xué)確定測(cè)量范圍
-
量程選不對(duì),精度總出錯(cuò)?壓力表使用誤區(qū)大揭秘!
-
隔膜式智能壓力變送器的應(yīng)用和優(yōu)勢(shì)
-
如何正確校準(zhǔn)壓力表以確保精度?
-
壓力儀表檢修必知:六大中心注意事項(xiàng)
-
船用夜光壓力表:船舶航行的“壓力守護(hù)者”
-
探秘膜片壓力表:工業(yè)壓力測(cè)量的“多面手”
-
探秘雙金屬電接點(diǎn)溫度計(jì):原理、應(yīng)用場(chǎng)景與選型全解析》
-
你知道壓力表可以分為多少種類(lèi)別嗎
AS快速對(duì)中校正儀定做
利用已知精度的標(biāo)準(zhǔn)工裝或模擬對(duì)中裝置,實(shí)際操作儀器進(jìn)行測(cè)量,對(duì)比“儀器讀數(shù)”與“標(biāo)準(zhǔn)值”的偏差,驗(yàn)證精度是否穩(wěn)定。此方法貼近現(xiàn)場(chǎng)使用場(chǎng)景,更具實(shí)際參考意義:1.HOJOLO激光對(duì)中儀的標(biāo)準(zhǔn)件測(cè)試(**典型)準(zhǔn)備“標(biāo)準(zhǔn)對(duì)中工裝”(由固定基座、可調(diào)節(jié)的“模擬軸”、精度已知的“偏差調(diào)節(jié)機(jī)構(gòu)”組成,如可精確設(shè)置“徑向偏差、角度偏差°”),按以下步驟測(cè)試:步驟1:將儀器的發(fā)射端、接收端分別固定在標(biāo)準(zhǔn)工裝的兩個(gè)“模擬軸”上,按儀器操作流程完成安裝校準(zhǔn);步驟2:通過(guò)工裝調(diào)節(jié)機(jī)構(gòu),設(shè)置1~3個(gè)典型偏差值(如“徑向°”“徑向°”,覆蓋自身設(shè)備的常見(jiàn)對(duì)中偏差范圍);步驟3:記錄儀器的“測(cè)量值”,與工裝的“標(biāo)準(zhǔn)偏差值”對(duì)比,計(jì)算“偏差率”(偏差率=|測(cè)量值-標(biāo)準(zhǔn)值|/標(biāo)準(zhǔn)值×100%)。合格判定:偏差率需≤儀器出廠精度的“允差范圍”,例如儀器標(biāo)注徑向精度±5μm,若標(biāo)準(zhǔn)值(100μm),測(cè)量值偏差需≤5μm,即偏差率≤5%,否則精度不達(dá)標(biāo)。 省 30% 人工 + 降 50% 故障!快速對(duì)中校正儀。AS快速對(duì)中校正儀定做
**傳感器類(lèi)型:非接觸式磁電/光電傳感器儀器通常配備2-4個(gè)“傳感器探頭”,分別吸附在主動(dòng)軸、從動(dòng)軸的聯(lián)軸器或軸段上(無(wú)需拆卸設(shè)備,通過(guò)磁力座固定),主流采用磁電式或光電式非接觸傳感技術(shù),特點(diǎn)是“響應(yīng)速度快(毫秒級(jí))、抗干擾強(qiáng)”,適配工業(yè)現(xiàn)場(chǎng)振動(dòng)、油污環(huán)境:磁電式傳感器:探頭內(nèi)置永久磁鐵和線(xiàn)圈,軸系轉(zhuǎn)動(dòng)時(shí),軸表面的微小凹凸(或特制的標(biāo)記點(diǎn))會(huì)導(dǎo)致磁場(chǎng)變化,線(xiàn)圈感應(yīng)出微弱電信號(hào)——信號(hào)的“頻率/幅值變化”與軸的“徑向跳動(dòng)、角度傾斜”直接關(guān)聯(lián),可實(shí)時(shí)捕捉軸系的動(dòng)態(tài)位置。光電式傳感器:探頭發(fā)射激光或紅外光,照射到軸上的反光標(biāo)靶(或軸表面),反射光被接收端捕捉;當(dāng)軸存在徑向偏移或角度傾斜時(shí),反射光的“位置/強(qiáng)度”會(huì)發(fā)生變化,傳感器將這種變化轉(zhuǎn)化為電信號(hào),實(shí)現(xiàn)位置數(shù)據(jù)采集。振動(dòng)快速對(duì)中校正儀批發(fā)快速對(duì)中校正儀的校準(zhǔn)數(shù)據(jù)可以存儲(chǔ)在哪些設(shè)備上?
HOJOLO在工業(yè)生產(chǎn)的精密作業(yè)場(chǎng)景中,設(shè)備軸系、部件的精細(xì)對(duì)位是保障生產(chǎn)效率、降低機(jī)械損耗的**前提。快速對(duì)中校正儀憑借“工業(yè)對(duì)位標(biāo)準(zhǔn)化”的**設(shè)計(jì),從根本上解決了傳統(tǒng)人工對(duì)位依賴(lài)經(jīng)驗(yàn)、誤差難控、質(zhì)量不穩(wěn)定等痛點(diǎn),為校準(zhǔn)質(zhì)量提供全流程保障,成為工業(yè)設(shè)備安裝、維護(hù)及生產(chǎn)過(guò)程中的關(guān)鍵支撐工具。其“工業(yè)對(duì)位標(biāo)準(zhǔn)化”的實(shí)現(xiàn),源于對(duì)校準(zhǔn)流程的全環(huán)節(jié)規(guī)范與技術(shù)賦能。一方面,儀器內(nèi)置了符合國(guó)際或行業(yè)通用標(biāo)準(zhǔn)的對(duì)位參數(shù)模型(如ISO標(biāo)準(zhǔn)軸系對(duì)中要求、特定行業(yè)設(shè)備的對(duì)位公差閾值等),替代了傳統(tǒng)人工憑手感、經(jīng)驗(yàn)判斷的模糊方式,讓每一次校準(zhǔn)都有明確的數(shù)值標(biāo)準(zhǔn)可依——無(wú)論是平行偏差、角度偏差,還是軸向位移等關(guān)鍵參數(shù),均能按照預(yù)設(shè)標(biāo)準(zhǔn)進(jìn)行量化檢測(cè),避免“因人而異”的校準(zhǔn)差異。
漢吉龍快速對(duì)中儀采集維度:同步捕捉“徑向+角度”雙維度數(shù)據(jù)為完整描述軸系偏差,傳感器需同步采集兩類(lèi)關(guān)鍵數(shù)據(jù),且采樣頻率極高(通常≥100Hz,即每秒采集100次以上),確保“實(shí)時(shí)性”:徑向位置數(shù)據(jù):通過(guò)兩個(gè)垂直方向(如水平X軸、垂直Y軸)的傳感器,捕捉兩軸在“水平方向的偏移量(如左偏/右偏)”和“垂直方向的偏移量(如上翹/下傾)”,單位通常為μm(微米)。角度位置數(shù)據(jù):通過(guò)分別安裝在主動(dòng)軸、從動(dòng)軸上的傳感器,捕捉兩軸軸線(xiàn)的“傾斜角度”(如主動(dòng)軸軸線(xiàn)相對(duì)從動(dòng)軸軸線(xiàn)的夾角),單位通常為°(度)或″(角秒,1°=3600″),部分高精度型號(hào)可精確到0.001°。快速對(duì)中校正儀的數(shù)據(jù)存儲(chǔ)容量是否會(huì)影響其測(cè)量精度?
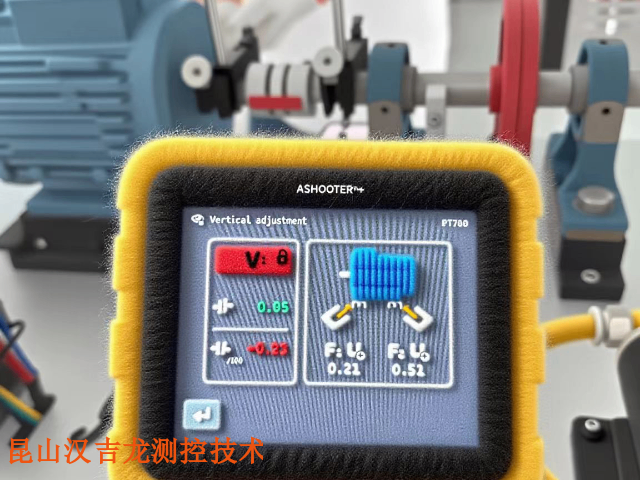
第四步:偏差計(jì)算與調(diào)整量輸出這是體現(xiàn)儀器“智能化”的關(guān)鍵環(huán)節(jié),通過(guò)內(nèi)置的對(duì)中算法(基于幾何原理推導(dǎo)),將換算后的偏差量轉(zhuǎn)化為“可直接操作的調(diào)整量”,具體邏輯如下:偏差類(lèi)型判斷:算法首先區(qū)分偏差類(lèi)型——是“*平行偏差”(兩軸平行但中心線(xiàn)不重合)、“*角度偏差”(兩軸中心線(xiàn)相交但不平行),還是“混合偏差”(兩者兼具),并以圖形化方式(如軸系示意圖)在屏幕上展示,方便運(yùn)維人員直觀理解。調(diào)整量計(jì)算:根據(jù)設(shè)備的安裝結(jié)構(gòu)(如電機(jī)的前腳、后腳支撐點(diǎn)位置)、兩軸間距(軸長(zhǎng))等參數(shù)(由用戶(hù)輸入或儀器自動(dòng)測(cè)量),算法通過(guò)幾何公式計(jì)算出“需要調(diào)整的具體數(shù)值”。例如:若電機(jī)軸相對(duì)于泵軸存在“前高后低”的角度偏差,算法會(huì)直接輸出“電機(jī)前腳需降低,后腳需升高”,無(wú)需人工記憶復(fù)雜公式(傳統(tǒng)對(duì)中需手動(dòng)計(jì)算調(diào)整量=偏差值×支撐點(diǎn)距離/軸長(zhǎng))。動(dòng)態(tài)修正:部分**機(jī)型支持“實(shí)時(shí)調(diào)整反饋”——運(yùn)維人員調(diào)整設(shè)備時(shí),儀器可實(shí)時(shí)采集新的位置數(shù)據(jù),重新計(jì)算偏差量并更新調(diào)整建議,直至偏差值低于預(yù)設(shè)閾值(如),實(shí)現(xiàn)“邊調(diào)邊看”,避免反復(fù)拆裝。精確無(wú)偏差!快速對(duì)中校正儀。HOJOLO快速對(duì)中校正儀哪里買(mǎi)
從 2 小時(shí)到 3 分鐘!快速對(duì)中校正儀,讓設(shè)備對(duì)位效率飆升 600%。AS快速對(duì)中校正儀定做
快速對(duì)中校正儀的**目標(biāo)是解決軸類(lèi)設(shè)備(如電機(jī)與泵、風(fēng)機(jī)與減速器等)的平行偏差(兩軸中心線(xiàn)在徑向的偏移)和角度偏差(兩軸中心線(xiàn)的傾斜)問(wèn)題,其工作原理圍繞“數(shù)據(jù)采集→信號(hào)處理→偏差計(jì)算→結(jié)果輸出”四大**環(huán)節(jié)展開(kāi),通過(guò)集成高精度傳感技術(shù)、智能算法與可視化交互,實(shí)現(xiàn)對(duì)中過(guò)程的自動(dòng)化與精細(xì)化。以下從技術(shù)原理、**組件作用、偏差計(jì)算邏輯三方面,詳細(xì)拆解其工作機(jī)制。快速對(duì)中校正儀本質(zhì)是“傳感+計(jì)算+交互”的集成系統(tǒng),其工作流程形成完整閉環(huán),無(wú)需人工干預(yù)復(fù)雜環(huán)節(jié),具體如下:第一步:設(shè)備安裝與基準(zhǔn)建立運(yùn)維人員*需將對(duì)中校正儀的兩個(gè)**單元(通常稱(chēng)為“發(fā)射單元”和“接收單元”)分別固定在主動(dòng)軸(如電機(jī)軸)和從動(dòng)軸(如泵軸)上,通過(guò)磁力座、夾持臂等配件確保單元與軸完全同心(即“基準(zhǔn)軸”與單元軸線(xiàn)重合)。部分**機(jī)型內(nèi)置“自動(dòng)找平功能”,可通過(guò)小型水平傳感器微調(diào)單元角度,避免人工安裝偏差影響后續(xù)數(shù)據(jù)。 AS快速對(duì)中校正儀定做
- 昆山軸對(duì)中激光儀保修 2025-09-20
- 傻瓜式激光對(duì)中服務(wù)裝置 2025-09-20
- 原裝進(jìn)口便攜同心度檢測(cè)儀操作步驟 2025-09-20
- 專(zhuān)業(yè)聯(lián)軸器不對(duì)中測(cè)量?jī)x使用視頻 2025-09-20
- 漢吉龍測(cè)控快速對(duì)中校正儀怎么用 2025-09-19
- 工廠快速對(duì)中校正儀貼牌 2025-09-19
- 自主研發(fā)振動(dòng)激光對(duì)中儀定做 2025-09-19
- 工廠激光對(duì)中服務(wù)貼牌 2025-09-19
- AS快速對(duì)中校正儀定做 2025-09-19
- 瑞典聯(lián)軸器不對(duì)中測(cè)量?jī)x怎么樣 2025-09-19
- 廣州品牌氣體監(jiān)測(cè)設(shè)備怎么樣 2025-09-20
- 江蘇熒光X射線(xiàn)-熒光雙模態(tài)成像系統(tǒng)回收價(jià) 2025-09-20
- 四川ESD高壓表模擬器公司 2025-09-20
- 陜西抗干擾強(qiáng)接近傳感器常用知識(shí) 2025-09-20
- 松江區(qū)智能化傳感器價(jià)目 2025-09-20
- 上海調(diào)度及車(chē)輛定位綜合管理調(diào)度管理系統(tǒng)報(bào)價(jià) 2025-09-20
- 閔行區(qū)推薦電壓表量大從優(yōu) 2025-09-20
- 杭州品牌電子測(cè)量?jī)x器哪家好 2025-09-20
- 安徽BEBICON空壓機(jī)特點(diǎn) 2025-09-20
- 江西抗干擾強(qiáng)傳感器一體化 2025-09-20