呼倫貝爾主動安全360全景多少錢
在商用車的日常運(yùn)營中,盲區(qū)問題一直是威脅行車安全的重大隱患。佳興偉誠商用車盲區(qū) 360 全景無死角監(jiān)測系統(tǒng)應(yīng)運(yùn)而生,為這一難題提供了完美解決方案。?該系統(tǒng)主要由多個高清攝像頭、毫米波雷達(dá)、超聲波雷達(dá)、車載處理單元和顯示屏組成。在商用車的車頭、車尾、車身兩側(cè)等關(guān)鍵位置,分別安裝 210° 超廣角高清攝像頭,可對車輛周邊環(huán)境進(jìn)行實(shí)時拍攝。同時,毫米波雷達(dá)與超聲波雷達(dá)能夠在復(fù)雜天氣及光線條件下,感知車輛周圍物體的距離與移動情況。?系統(tǒng)的功能十分強(qiáng)大。通過圖像拼接技術(shù),能將多個攝像頭采集到的畫面無縫拼接,為駕駛員呈現(xiàn)出 360° 全景鳥瞰圖,讓車輛周圍狀況一目了然,徹底消除傳統(tǒng)后視鏡的盲區(qū)。其搭載的 AI 智能識別算法,可自動檢測出 5 - 7 米范圍內(nèi)的行人、車輛、障礙物等移動目標(biāo),并根據(jù)危險程度分級觸發(fā)語音提示與 90 - 120dB 的聲光報警。例如,當(dāng)檢測到左側(cè)有行人靠近時,系統(tǒng)會清晰播報 “左側(cè)有人,請注意!”,同時車內(nèi)顯示屏上對應(yīng)的目標(biāo)位置會以紅框閃爍標(biāo)記。礦山作業(yè)環(huán)境惡劣,佳興偉誠礦車 360 度全景環(huán)視駕駛輔助系統(tǒng)為駕駛員提供清晰視野。呼倫貝爾主動安全360全景多少錢
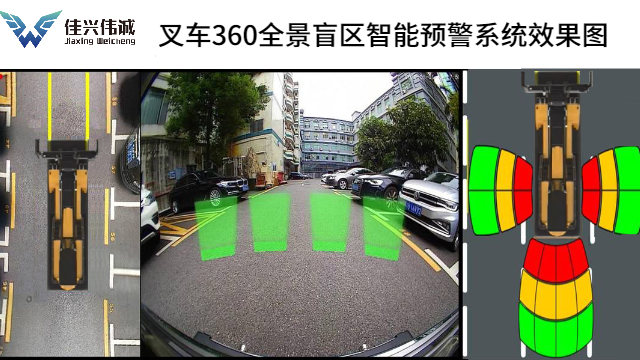
環(huán)衛(wèi)清潔車在城市環(huán)境維護(hù)中扮演著至關(guān)重要的角色,它們不辭辛勞地清掃街道、收集垃圾,為城市的整潔美麗付出努力。然而,由于環(huán)衛(wèi)清潔車車身較大,存在眾多盲區(qū),在作業(yè)和行駛過程中極易引發(fā)安全事故,對環(huán)衛(wèi)工人、其他道路使用者的生命安全構(gòu)成威脅。為了有效解決這一問題,360 全景盲區(qū)預(yù)警系統(tǒng)應(yīng)運(yùn)而生,成為提升環(huán)衛(wèi)清潔車安全性的關(guān)鍵技術(shù)。 360 全景盲區(qū)預(yù)警系統(tǒng)主要基于多個攝像頭和先進(jìn)的圖像算法。在環(huán)衛(wèi)清潔車的車身四周,包括車頭、車尾、兩側(cè)后視鏡下方等位置,安裝多個高清攝像頭。這些攝像頭實(shí)時采集車輛周圍的圖像信息,并將其傳輸至中心處理器。中心處理器通過圖像拼接算法,將各個攝像頭的畫面整合為一個完整的 360 度全景圖像,呈現(xiàn)在駕駛室內(nèi)的顯示屏上。同時,系統(tǒng)利用圖像識別技術(shù),對車輛周圍的物體進(jìn)行檢測和分析。當(dāng)檢測到有行人、車輛或其他障礙物進(jìn)入盲區(qū)時,系統(tǒng)會根據(jù)距離和危險程度,及時發(fā)出不同級別的預(yù)警信號,如聲音警報、屏幕閃爍提示等,提醒駕駛員注意潛在的危險。呼倫貝爾礦車盲區(qū)360全景定制工程車 360 全景駕駛輔助系統(tǒng)當(dāng)物體進(jìn)入不同區(qū)域時發(fā)出相應(yīng)級別報警,提醒駕駛員分級應(yīng)對。
自卸車在礦區(qū)運(yùn)輸時,車身長且載貨后視野受限,轉(zhuǎn)彎和倒車易出事故。佳興偉誠的 自卸車360 全景環(huán)視駕駛輔助系統(tǒng),通過車身四周的高清攝像頭,將實(shí)時畫面拼接成全景影像。駕駛員在駕駛室內(nèi)就能清晰看到車身周圍的礦道、其他車輛及人員。轉(zhuǎn)彎時,系統(tǒng)自動放大側(cè)方盲區(qū)畫面,駕駛?cè)藛T能夠通過屏幕一覽無余的看到側(cè)方盲區(qū);倒車時,顯示車尾與障礙物的距離并動態(tài)提示。該系統(tǒng)適應(yīng)礦區(qū)顛簸環(huán)境,攝像頭防粉塵、抗振動,讓自卸車在復(fù)雜路況下行駛更安全,減少碰撞事故。
工程機(jī)械是國民經(jīng)濟(jì)發(fā)展的重要生產(chǎn)工具,在基礎(chǔ)設(shè)施建設(shè)中工程機(jī)械發(fā)揮著重 要作用,而在工程機(jī)械領(lǐng)域,挖掘機(jī)是其中重要的細(xì)分產(chǎn)品之一,挖掘機(jī)是一種 用于公路、鐵路、建筑、水電、港口、礦山等建設(shè)工程的土石方施工機(jī)械。 然而工程機(jī)械往往是體型過大,容易被遮擋視線。在作業(yè)環(huán)境中,很多地方是光線差、 噪聲大的惡劣環(huán)境作業(yè),而車輛上配置的后視鏡卻很難起到應(yīng)有的作用。而在建設(shè)工地、 石場,道路建設(shè)場所多為露天作業(yè),往往是粉塵多、噪音大,工況環(huán)境復(fù)雜,作業(yè)工人多, 其他作業(yè)車也多,往往是人車交互密集,很容易發(fā)生碾壓等安全生產(chǎn)事故。 為貫徹落實(shí)安全作業(yè)管理目標(biāo),打造作業(yè)現(xiàn)場車輛全天候、安全監(jiān)管模式,佳興偉 誠將AI視覺技術(shù)融入工程車視頻監(jiān)控系統(tǒng),研發(fā)應(yīng)用工程車輛360度AI預(yù)警作業(yè)輔助系統(tǒng),實(shí) 現(xiàn)工程作業(yè)車輛360度范圍內(nèi)人員的智能識別,并且顯示人員與作業(yè)車輛的距離,當(dāng)距離過近 時,系統(tǒng)自動語音播報及時提醒車輛作業(yè)人員注意安全,避免施工安全事故的發(fā)生。特種車360全景預(yù)警系統(tǒng)通過不斷優(yōu)化的圖像融合技術(shù),確保全景畫面過渡自然,無拼接痕跡。
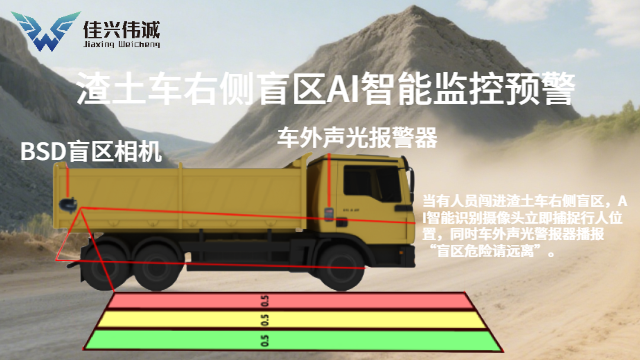
佳興偉誠科技研發(fā)的工程車輛360全景環(huán)視駕駛輔助系統(tǒng)融入人工智能(AI)技術(shù),實(shí)現(xiàn)從“看見周圍”到“理解風(fēng)險”的質(zhì)變飛躍。通過在前端攝像頭或中心處理單元集成高性能AI加速芯片,系統(tǒng)能夠?qū)崟r運(yùn)行復(fù)雜的深度學(xué)習(xí)模型,對全景影像中的目標(biāo)進(jìn)行檢測、分類與跟蹤。這雙“智能之眼”不能識別出車輛、行人、等物體,更能精確區(qū)分出靠近人員的姿態(tài)。系統(tǒng)結(jié)合雷達(dá)的測距測速數(shù)據(jù)與AI視覺的語義信息,構(gòu)建車輛周圍動態(tài)環(huán)境的精細(xì)化數(shù)字孿生。基于此,其預(yù)警策略不再是簡單的距離閾值觸發(fā),而是演進(jìn)為具備預(yù)測能力的主動安全防護(hù):例如,當(dāng)系統(tǒng)識別到有行人正快速從側(cè)后方斜進(jìn)入車輛轉(zhuǎn)彎內(nèi)輪差區(qū)域,或有人蹲在自卸車正前方輪胎附近時,即使目標(biāo)尚未進(jìn)入預(yù)設(shè)的報警距離,系統(tǒng)也能依據(jù)其運(yùn)動軌跡預(yù)測和位置關(guān)系,提前發(fā)出更高優(yōu)先級的緊急警報。這種基于AI的意圖理解和風(fēng)險預(yù)測能力,極大提升了預(yù)警的性和前瞻性,為操作員爭取到更充裕的避險反應(yīng)時間,將事故扼殺在萌芽狀態(tài)。特種車360全景駕駛輔助系統(tǒng)可根據(jù)不同車型定制化安裝,無需大規(guī)模改造車輛,適配性強(qiáng)。晉中礦車盲區(qū)360全景定制
商用車360全景預(yù)警系統(tǒng)支持自定義畫面顯示區(qū)域,駕駛員可根據(jù)自身需求重點(diǎn)關(guān)注特定盲區(qū)。呼倫貝爾主動安全360全景多少錢
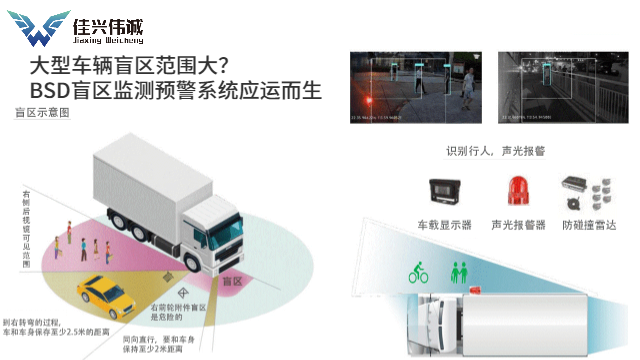
在工程建設(shè)領(lǐng)域,工程車的安全運(yùn)營始終是重中之重,而盲區(qū)則是導(dǎo)致事故的 關(guān)鍵因素。工程車 360 全景盲區(qū)監(jiān)測預(yù)警系統(tǒng)的出現(xiàn),正是為了解決這一難題。對于體型龐大的工程車而言,駕駛員的視野存在諸多局限,車頭下方、車身側(cè)面、車尾等位置的盲區(qū)極易隱藏行人、小型車輛或障礙物,稍有不慎就可能引發(fā)碰撞事故。尤其是在建筑工地、礦山、港口等復(fù)雜作業(yè)環(huán)境中,人員與車輛混合作業(yè)頻繁,盲區(qū)風(fēng)險更是被放大。這套系統(tǒng)通過分布在車輛四周的高清攝像頭,實(shí)時采集各個方位的畫面,經(jīng)過算法處理后形成一幅完整的 360 度全景影像,直觀地呈現(xiàn)在駕駛室內(nèi)的顯示屏上,讓駕駛員能夠清晰掌握車輛周圍 360 度的實(shí)時狀況,就像擁有了 “上帝視角”,從根源上減少因視線盲區(qū)導(dǎo)致的安全隱患。呼倫貝爾主動安全360全景多少錢
- 錫林郭勒商用車前向防碰撞預(yù)警多少錢 2025-09-20
- 西安商用車盲區(qū)防碰撞預(yù)警廠家 2025-09-20
- 呼倫貝爾主動安全360全景多少錢 2025-09-20
- 呼和浩特汽車防撞防碰撞預(yù)警 2025-09-20
- 黔東南工程車防碰撞預(yù)警找哪家 2025-09-20
- 漢中大型車輛盲區(qū)防碰撞預(yù)警定制設(shè)計(jì) 2025-09-20
- 畢節(jié)消防車北斗5G定位定制設(shè)計(jì) 2025-09-20
- 昌都山區(qū)工程車北斗5G定位服務(wù)商 2025-09-20
- 濟(jì)南車隊(duì)北斗5G定位廠家 2025-09-20
- 天津主動安全防碰撞預(yù)警系統(tǒng) 2025-09-20
- 重慶園區(qū)保安公司資質(zhì)有哪些 2025-09-20
- 錫林郭勒商用車前向防碰撞預(yù)警多少錢 2025-09-20
- 安徽眼動追蹤手機(jī) 2025-09-20
- 江蘇電車換電柜滅火解決方案 2025-09-20
- 新疆車牌識別智能道閘多少錢 2025-09-20
- 深圳制卡廠廠家批發(fā)滴膠卡定制 2025-09-20
- 四川振動光纖主機(jī)貨源 2025-09-20
- 天津智能RFID嵌體生產(chǎn)企業(yè) 2025-09-20
- 江蘇新型換電柜滅火裝置 2025-09-20
- 瑤海區(qū)本地短信服務(wù)對比價 2025-09-20